




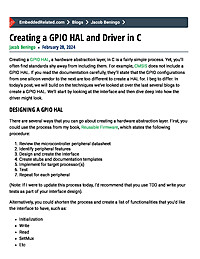
Creating a GPIO HAL and Driver in C
Creating a GPIO Hardware Abstraction Layer (HAL) in C allows for flexible microcontroller interfacing, overcoming the challenge of variability across silicon vendors. This method involves reviewing datasheets, identifying features, designing interfaces, and iterative development, as detailed in the "Reusable Firmware" process. A simplified approach prioritizes essential functions like initialization and read/write operations, showcased through a minimal interface example. The post also highlights the use of AI to expedite HAL generation. A detailed GPIO HAL version is provided, featuring extended capabilities and facilitating driver connection through direct assignments or wrappers. The significance of a configuration table for adaptable peripheral setup is emphasized. Ultimately, the blog illustrates the ease and scalability of developing a GPIO HAL and driver in C, promoting hardware-independent and extensible code for various interfaces, such as SPI, I2C, PWM, and timers, underscoring the abstraction benefits.

You Don't Need an RTOS (Part 1)
In this first article, we'll compare our two contenders, the superloop and the RTOS. We'll define a few terms that help us describe exactly what functions a scheduler does and why an RTOS can help make certain systems work that wouldn't with a superloop. By the end of this article, you'll be able to: - Measure or calculate the deadlines, periods, and worst-case execution times for each task in your system, - Determine, using either a response-time analysis or a utilization test, if that set of tasks is schedulable using either a superloop or an RTOS, and - Assign RTOS task priorities optimally.


3D printing for embedded development
Used mostly for creating little plastic objects, the desktop 3D printer is not an obvious addition to the embedded developer's toolbox. However, if you're looking for more reasons to get one, or already have one that's mostly gathering dust, here are a couple of embedded-related ways to get more value out of it.

Unraveling the Enigma: Object Detection in the World of Pixels
Exploring the realm of embedded systems co-design for object recognition, this blog navigates the convergence of hardware and software in revolutionizing industries. Delving into real-time image analysis and environmental sensing, the discussion highlights advanced object detection and image segmentation techniques. With insights into Convolutional Neural Networks (CNNs) decoding pixel data and autonomously extracting features, the blog emphasizes their pivotal role in modern computer vision. Practical examples, including digit classification using TensorFlow and Keras on the MNIST dataset, underscore the power of CNNs. Through industry insights and visualization aids, the blog unveils a tapestry of innovation, charting a course towards seamless interaction between intelligent embedded systems and the world.

There's a State in This Machine!
An introduction to state machines and their implementation. Working from an intuitive definition of the state machine concept, we will start with a straightforward implementation then we evolve it into a more robust and engineered solution.
How Embedded Linux is used in Spacecrafts !
This article dives into the application of Linux in spacecraft, examining the challenges it poses and proposing potential solutions. Real-life examples will be discussed, while also addressing the drawbacks of employing Linux in safety-critical missions.
Getting Started With Zephyr: Bluetooth Low Energy
In this blog post, I show how to enable BLE support in a Zephyr application. First, I show the necessary configuration options in Kconfig. Then, I show how to use the Zephyr functions and macros to create a custom service and characteristic for a contrived application.

++i and i++ : what’s the difference?
Although the ++ and -- operators are well known, there are facets of their operation and implementation that are less familiar to many developers.

Getting Started With CUDA C on an Nvidia Jetson: Hello CUDA World!
In this blog post, I introduce CUDA, which is a framework designed to allow developers to take advantage of Nvidia's GPU hardware acceleration to efficiently implement certain type of applications. I demonstrate an implementation to perform vector addition using CUDA C and compare it against the traditional implementation in "regular" C.
3D printing for embedded development
Used mostly for creating little plastic objects, the desktop 3D printer is not an obvious addition to the embedded developer's toolbox. However, if you're looking for more reasons to get one, or already have one that's mostly gathering dust, here are a couple of embedded-related ways to get more value out of it.
Creating a Hardware Abstraction Layer (HAL) in C
In my last post, C to C++: Using Abstract Interfaces to Create Hardware Abstraction Layers (HAL), I discussed how vital hardware abstraction layers are and how to use a C++ abstract interface to create them. You may be thinking, that’s great for C++, but I work in C! How do I create a HAL that can easily swap in and out different drivers? In today’s post, I will walk through exactly how to do that while using the I2C bus as an example.

How to Read a Power MOSFET Datasheet
One of my pet peeves is when my fellow engineers misinterpret component datasheets. This happened a few times recently in separate instances, all involving power MOSFETs. So it’s time for me to get on my soapbox. Listen up! I was going to post...
You Don't Need an RTOS (Part 1)
In this first article, we'll compare our two contenders, the superloop and the RTOS. We'll define a few terms that help us describe exactly what functions a scheduler does and why an RTOS can help make certain systems work that wouldn't with a superloop. By the end of this article, you'll be able to: - Measure or calculate the deadlines, periods, and worst-case execution times for each task in your system, - Determine, using either a response-time analysis or a utilization test, if that set of tasks is schedulable using either a superloop or an RTOS, and - Assign RTOS task priorities optimally.

Getting Started with the Microchip PIC® Microcontroller
This first post of a five part series looks at the available hardware options for getting started with Microchip 8-bit PIC® Microcontroller, explores the MPLAB® X Integrated Development Environment and walks through setting up a project to expose the configured clock to an external pin and implement a single output GPIO to light an LED.
Unraveling the Enigma: Object Detection in the World of Pixels
Exploring the realm of embedded systems co-design for object recognition, this blog navigates the convergence of hardware and software in revolutionizing industries. Delving into real-time image analysis and environmental sensing, the discussion highlights advanced object detection and image segmentation techniques. With insights into Convolutional Neural Networks (CNNs) decoding pixel data and autonomously extracting features, the blog emphasizes their pivotal role in modern computer vision. Practical examples, including digit classification using TensorFlow and Keras on the MNIST dataset, underscore the power of CNNs. Through industry insights and visualization aids, the blog unveils a tapestry of innovation, charting a course towards seamless interaction between intelligent embedded systems and the world.
Embedded Systems Roadmaps
What skills should every embedded systems engineer have? What should you study next to improve yourself as an embedded systems engineer? In this article I'll share with you a few lists from well-respected sources that seek to answer these questions, with the hope of helping provide you a path to mastery. Whether you've only just finished your first Arduino project or you've been building embedded systems for decades, I believe there's something in here for everyone to help improve themselves as embedded systems engineers.

Getting Started With CUDA C on an Nvidia Jetson: GPU Architecture
In the previous blog post (Getting Started With CUDA C on Jetson Nvidia: Hello CUDA World!) I showed how to develop applications targeted at a GPU on a Nvidia Jetson Nano. As we observed in that blog post, performing a calculation on a 1-D array on a GPU had no performance benefit compared to a traditional CPU implementation, even on an array with many elements. In this blog post, we will learn about the GPU architecture to better explain the behavior and to understand the applications where a GPU shines (hint: it has to do with graphics).
When a Mongoose met a MicroPython
This is more a framework than an actual application, with it you can integrate MicroPython and Cesanta's Mongoose.
Mongoose runs when called by MicroPython and is able to run Python functions as callbacks for the events you decide in your event handler. The code is completely written in C, except for the example Python callback functions, of course. To try it, you can just build this example on a Linux machine, and, with just a small tweak, you can also run it on any ESP32 board.









