




More than just a pretty face - a good UI is essential
A user interface can make or break a device - determining its success in the marketplace. With careful design, the UI can make the product compelling and result in a high level of satisfaction from new and experienced users.

Lightweight C++ Error-Codes Handling
The traditional C++ approach to error handling tends to distinguish the happy path from the unhappy path. This makes handling errors hard (or at least boring) to write and hard to read. In this post, I present a technique based on chaining operations that merges the happy and the unhappy paths. Thanks to C++ template and inlining the proposed technique is lightweight and can be used proficiently for embedded software.
Embedded Systems Roadmaps
What skills should every embedded systems engineer have? What should you study next to improve yourself as an embedded systems engineer? In this article I'll share with you a few lists from well-respected sources that seek to answer these questions, with the hope of helping provide you a path to mastery. Whether you've only just finished your first Arduino project or you've been building embedded systems for decades, I believe there's something in here for everyone to help improve themselves as embedded systems engineers.

Embedded Systems Co-design for Object Recognition: A Synergistic Approach
Embedded systems co-design for object recognition is essential for real-time image analysis and environmental sensing across various sectors. This methodology harmonizes hardware and software to optimize efficiency and performance. It relies on hardware accelerators, customized neural network architectures, memory hierarchy optimization, and power management to achieve benefits like enhanced performance, lower latency, energy efficiency, real-time responsiveness, and resource optimization. While challenges exist, co-designed systems find applications in consumer electronics, smart cameras, industrial automation, healthcare, and autonomous vehicles, revolutionizing these industries. As technology advances, co-design will continue to shape the future of intelligent embedded systems, making the world safer and more efficient.
What is Pulse Width Modulation and How Does It Work?
Pulse Width Modulation (PWM) is a technique used to control the average voltage supplied to a device or component by adjusting the width of a series of pulses. It works by rapidly turning a signal on and off at a specific frequency. The crucial element of PWM is the duty cycle, which represents the percentage of time the signal is “on” (high voltage) compared to the total time of one cycle.
Getting Started With Zephyr: Saving Data To Files
In this blog post, I show how to implement a Zephyr application to mount a microSD card, create a new file on the microSD card, and write data to it. The lessons learned from such an application can be helpful for devices out in the field that need to write data to off-board memory periodically, especially in cases where Internet access may be sporadic.

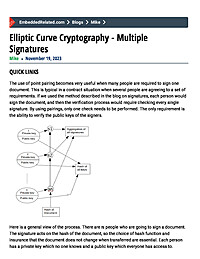
Elliptic Curve Cryptography - Extension Fields
An introduction to the pairing of points on elliptic curves. Point pairing normally requires curves over an extension field because the structure of an elliptic curve has two independent sets of points if it is large enough. The rules of pairings are described in a general way to show they can be useful for verification purposes.
Software is free and can right any wrong
Software changes are so much easier than hardware modifications, so the temptation is always to take this approach to fixing bugs. This may not always be a good idea.

MSP430 Launchpad Tutorial - Part 2 - Interrupts and timers
What is an "interrupt"? It is a signal that informs our MCU that a certain event has happened, causing the interruption of the normal flow of the main program and the execution of an "interrupt routine", that handles the event and takes a...

From Baremetal to RTOS: A review of scheduling techniques
Transitioning from bare-metal embedded software development to a real-time operating system (RTOS) can be a difficult endeavor. Many developers struggle with the question of whether they should use an RTOS or simply use a bare-metal scheduler....

Cortex-M Exception Handling (Part 1)
This article describes how Cortex-M processors handle interrupts and, more generally, exceptions, a concept that plays a central role in the design and implementation of most embedded systems.

Arduino robotics #1 - motor control
Arduino Robotics Beginner robotics is a series of article chronicling my first autonomous robot build, Clusterbot. This build is meant to be affordable, relatively easy and instructive. The total cost of the build is around $50....

Introduction to Microcontrollers - Interrupts
[quicklinks] It's Too Soon To Talk About Interrupts! That, at least, could be one reaction to this chapter. But over the years I've become convinced that new microcontroller programmers should understand interrupts before being...

MSP430 LaunchPad Tutorial - Part 4 - UART Transmission
Today we are going to learn how to communicate using UART with the Launchpad. For this purpose I will replace the default microcontroller that comes with the board with the MSP430G2553. It is the most powerful device in the MSP430 Value Line and...

Square root in fixed point VHDL
We will design and implement a fixed point square root function in VHDL. The algorithm is based on the recursive inverse square root algorithm based on Newton Raphson and offers parametrizable pipeline depth, word length and the algorithm is built on records and procedures.

C to C++: Using Abstract Interfaces to Create Hardware Abstraction Layers (HAL)
In C to C++, we've been exploring how to transition from a C developer to a C++ developer when working in embedded system. In this post, we will explore how to leverage classes to create hardware abstraction layers (HAL). You'll learn about the various inheritance mechanisms, what an virtual function is, and how to create an abstract class.
Review: Hands-On RTOS with Microcontrollers
Full disclosure: I was given a free copy of this book for evaluation.Hands-On RTOS with Microcontrollers: Building real-time embedded systems using FreeRTOS, STM32 MCUs, and SEGGER debug tools by Brian Amos is an outstanding book. It lives...

So You Want To Be An Embedded Systems Developer
Then listen now to what I say. Just get an electric guitar and take some time and learn how to play. Oh, wait, that's a song by the Byrds. But the strategy is the same. Get some information and tools and learn how to use them. No need to...









