




Basic Sensors for an Autonomous Vehicle
The following are a few basic sensors that can be used to help an autonomous vehicle navigate its environment.
The faster the vehicle is traveling, the faster the sensor must be processed.
Moving vehicles could knock something over or cause damage to a person or object if it collides with them.
Drop-off and line sensors function better when mounted to the front of the vehicle.
Drop-off and collision sensors should be mounted front and rear, if your vehicle can back up.
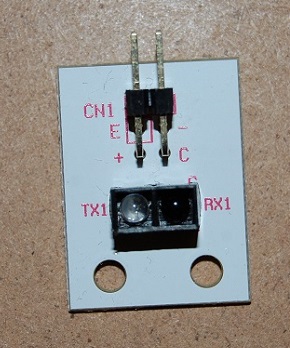
LINE FOLLOWER SENSOR
Radio Shack: https://github.com/RadioShackCorp/2770172-MakeItRo...
This sensor is used with the Make/Radio Shack line follower vehicle to detect the line.
SWITCHES
Normally Open (N.O)
A Normally Open switch doesn't make contact until it is pushed in. This could be useful when making a bumper - when the switch is detected as closed, the vehicle can stop. I would not recommend this around fragile objects. This is also used to reset some microcontrollers and microprocessors.
Normally Closed (N.C)
This switch always makes contact. This could be used to temporarily cut power in a collision, but when the vehicle drifts backwards, it will try to power forwards again. If you try to use this as a Reset switch on an Intel 8088, for instance, you have to hold the switch down so it doesn't continually keep resetting. I was sitting in lab one day, and heard one of the electronics professors say, "Go ask Radio Shack if he has a switch you can trade." So, I traded him an N.O. for the N.C.
Tactile
This is an ordinary push button switch. It is sometimes used as an Arduino reset switch.
Lever
The switch makes contact when the lever is pushed down. It could also be used as a part of a bumper.
Roller Lever
This switch operates the same as a lever switch, but has a roller on the end that can help prevent it from catching on obstacles and help it maintain better contact with the surface..

PING SENSOR
The PING sensor is used to detect obstacles or distance to an object. Because this sensor relies on signals being bounced back, it may have trouble with obstacles that are rough instead of smooth.
Parallax: https://www.parallax.com/product/28015
Radio Shack: https://www.radioshack.com/products/radioshack-ult...
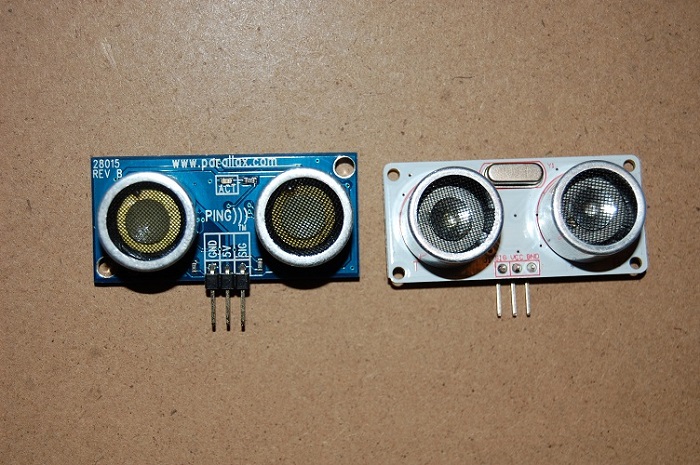
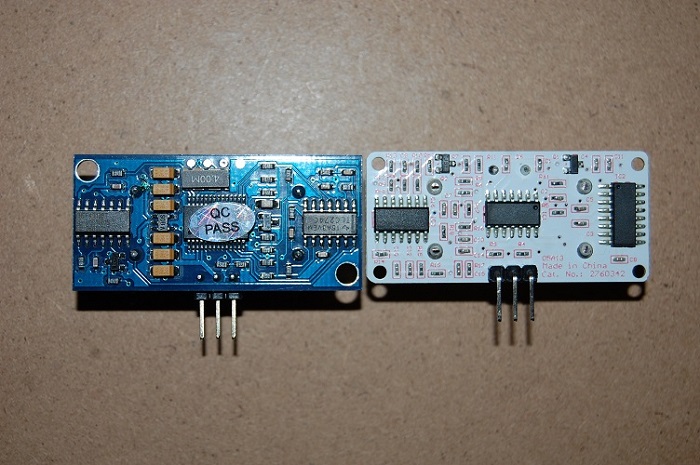
Front view: Parallax - left; Radio Shack - right
Notice that the ground and signal pins are reversed between the two.
PASSIVE INFRARED SENSOR
This sensor detects changes in temperature.
Radio Shack Make sensor kit: https://github.com/RadioShackCorp/2770172-MakeItRo...
Parallax
Rev. A: https://www.parallax.com/product/910-28027
Rev. B: https://www.parallax.com/product/555-28027
Radio Shack: https://www.radioshack.com/products/radioshack-pas...





- Comments
- Write a Comment Select to add a comment
To post reply to a comment, click on the 'reply' button attached to each comment. To post a new comment (not a reply to a comment) check out the 'Write a Comment' tab at the top of the comments.
Please login (on the right) if you already have an account on this platform.
Otherwise, please use this form to register (free) an join one of the largest online community for Electrical/Embedded/DSP/FPGA/ML engineers:








