



Steering an autonomous vehicle - two basic ways
While there are many types of steering mechanisms, for now, I will be concentrating on two of them.
The first is known as Ackerman-type steering. On a rear-wheel-drive four-wheeled car, the rear wheels push the vehicle while the two front wheels pivot left and right, either by using a servo or a geared motor, to steer the vehicle. Understeer is when the vehicle tries to push through the turn too wide, possibly causing the vehicle to drive off the outside of the course. Oversteer is when the vehicle turns sharper than expected, and can cause the vehicle to roll or drive off the inside of the course. Because of lower ground friction, this type is more energy efficient. It is more complicated in terms of mechanical parts, and can not do zero-turn. This type of steering is better suited to putting encoders in the wheels because of less wheel-slippage. Less wheel-slippage makes for better dead-reckoning.
A variation of this is four wheel steering where the front and rear wheels turn in different directions, which gives a shorter turn radius. This is helpful when navigating tight places, but can be unstable at high speeds.

-----
The second is called skid-steering. To go straight, both the left and right wheel must travel at an equal speed. To go left, the right wheel must turn faster; and to go right, the left wheel must turn faster. If one side goes forward and the other in reverse, the vehicle can almost turn in its own length, or zero-turn. This is simpler to build, for instance a four wheel drive vehicle could be made with two motors and chains connecting front and back of each side; or each wheel could have a motor. Because of how it turns, there must be some tire to ground slippage, which defeats wheel encoders.
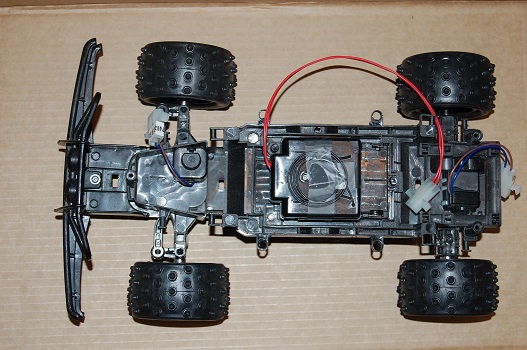
Four wheels seem to be more stable. This particular vehicle has four independent motors. When all four turn the same way the vehicle travels forward or reverse. The left side motors and right side motors must travel in the same direction. To turn right, both left side motors must travel faster than both right side motors in order to turn, and the opposite for a left turn. Causing both motors on one side to travel in the opposite direction of both motors on the other side results in a very tight pivot and depending on speed, can be very unstable. Since it has four motors and requires two motor controllers, the electronics are a bit more complicated.

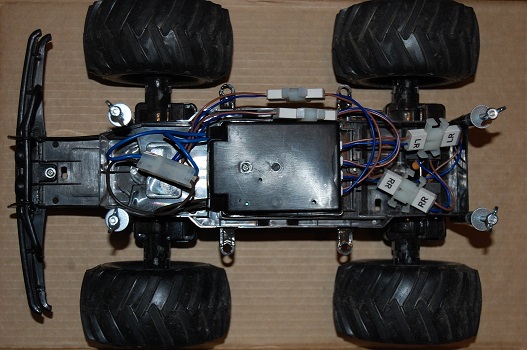
This skid steer only has two drive wheels. Due to lack of weight on the arm in the back, this vehicle has a tendency to rock forward when it stops. Since it only has two drive wheels, it can turn very quickly which makes the first person camera view blurry.
These are just two of the many steering types available. The final choice depends on terrain and environment.




- Comments
- Write a Comment Select to add a comment
To post reply to a comment, click on the 'reply' button attached to each comment. To post a new comment (not a reply to a comment) check out the 'Write a Comment' tab at the top of the comments.
Please login (on the right) if you already have an account on this platform.
Otherwise, please use this form to register (free) an join one of the largest online community for Electrical/Embedded/DSP/FPGA/ML engineers:



