



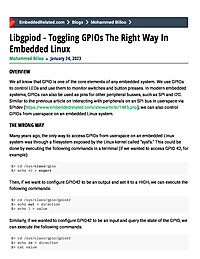
Libgpiod - Toggling GPIOs The Right Way In Embedded Linux
Overview We all know that GPIO is one of the core elements of any embedded system. We use GPIOs to control LEDs and use them to monitor switches and button presses. In modern embedded systems, GPIOs can also be used as pins for other peripheral...

Basler pylon on Raspberry Pi with Yocto
Camera vendors are increasing offering Yocto layers to simplify the integration of drivers and the creation of cross-compilation environments. This article demonstrates how Yocto can be used to integrate Basler pylon into a Raspberry Pi Linux...
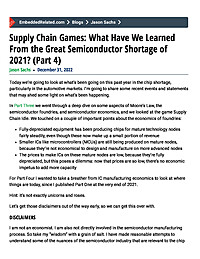
Supply Chain Games: What Have We Learned From the Great Semiconductor Shortage of 2021? (Part 4)
Today we’re going to look at what’s been going on this past year in the chip shortage, particularly in the automotive markets. I’m going to share some recent events and statements that may shed some light on what’s...
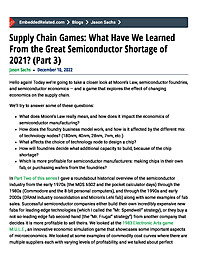
Supply Chain Games: What Have We Learned From the Great Semiconductor Shortage of 2021? (Part 3)
Hello again! Today we’re going to take a closer look at Moore’s Law, semiconductor foundries, and semiconductor economics — and a game that explores the effect of changing economics on the supply chain. We’ll try to...

A Beginner's Guide to Embedded Systems
I was in my Junior year of college when I first learned about embedded systems. Sure, I’d heard about this mystical world of sensors and IoT, the same way I’d heard about thermonuclear astrophysics; But, the phrase “embedded systems”...

Peripheral Interaction Without a Linux Device Driver Using Spidev
Overview When integrating a new peripheral onto an embedded Linux platform, we might think we always need to implement a kernel module to serve as a device driver. However, as we all know, absolutes such as “always” and “never” are...

In Memoriam: Frederick P. Brooks, Jr. and The Mythical Man-Month
It is with some sadness that I have read that Fred Brooks has passed away. Brooks (1931 - 2022) worked at IBM and managed a large team developing the IBM System/360 computers in the early 1960s. Brooks was thirty years old at the start of...
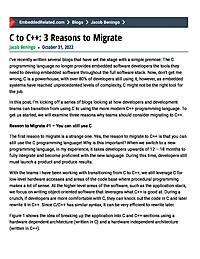
C to C++: 3 Reasons to Migrate
I’ve recently written several blogs that have set the stage with a simple premise: The C programming language no longer provides embedded software developers the tools they need to develop embedded software throughout the full software stack....

Soft Skills For Embedded Systems Software Developers
Contents: Introduction The Skills Interpersonal Tips For Interpersonal Skills Communications Tips For Speaking Tips For Writing Tips For Diagramming Time Management Tips For Time Management Deep Focus Tips For Deep...

Getting Started With Embedded Linux - From Nothing To A Login Prompt
One of the famous observations that have been made related to embedded systems is referred to as “Moore’s Law”, which states that the number of transistors in integrated circuits doubles every year. This observation has held mostly true...
Basler pylon on Raspberry Pi with Yocto
Camera vendors are increasing offering Yocto layers to simplify the integration of drivers and the creation of cross-compilation environments. This article demonstrates how Yocto can be used to integrate Basler pylon into a Raspberry Pi Linux...

Important Programming Concepts (Even on Embedded Systems) Part VI : Abstraction
Earlier articles: Part I: Idempotence Part II: Immutability Part III: Volatility Part IV: Singletons Part V: State Machines We have come to the last part of the Important Programming Concepts series, on abstraction. I thought I might...

Skills For Embedded Systems Software Developers
Contents: Introduction Do I Need To Be An Expert In Everything? How Much Time Do I need? Do I need A College Degree? Why Is The List So Big? Do I Really Need All These Things? The Skills Software Hardware Software Development...

Learning A New Microcontroller
Contents: Introduction Background For The Beginner The Peripherals System Complexity Support Software Do It Like Phil The Programs GPIO And Timers UART And Timers I2C/SPI PWM ADC Go Crazy And Combine Them All WET And DRY...
Supply Chain Games: What Have We Learned From the Great Semiconductor Shortage of 2021? (Part 2)
Welcome back! Today we’re going to zoom around again in some odd directions, and give a roundabout introduction to the semiconductor industry, touching on some of the following questions: How do semiconductors get designed and...
Working With ESP-C3-32S-Kit Dev Board
Introduction The ESP-C3-32S-Kit is a small dev board made by Ai.Thinker, containing an ESP-C3-32S SoC module, supporting WiFi and BLE: Development for the board uses the Espressif IoT Development Framework...
Scorchers, Part 3: Bare-Metal Concurrency With Double-Buffering and the Revolving Fireplace
This is a short article about one technique for communicating between asynchronous processes on bare-metal embedded systems. Q: Why did the multithreaded chicken cross the road? A: to To other side. get the — Jason Whittington There...

Absolute Beginner's Guide To Getting Started With Raspberry Pi
The Raspberry Pi is a great little computer for learning programming in general, as well as embedded systems. It runs a version of the Linux OS (Operating System) called Raspberry Pi OS (formerly called Raspbian, so you'll see that name a lot,...

Ten Little Algorithms, Part 5: Quadratic Extremum Interpolation and Chandrupatla's Method
Today we will be drifting back into the topic of numerical methods, and look at an algorithm that takes in a series of discretely-sampled data points, and estimates the maximum value of the waveform they were sampled from.









