




Open Source in Embedded System Development
This paper introduces the huge range of free and open source software available to the embedded software developer. Hardware modeling, software tool chains, operating systems (RTOS and Linux), middleware and applications are all covered. Today open source is spreading to the hardware world. The paper addresses the advantages and risks associated with using free and open source software, including the issues of quality, support and licensing.

Arduino Microcontroller Guide
The Arduino microcontroller is an easy to use yet powerful single board computer that has gained considerable traction in the hobby and professional market. The Arduino is open-source, which means hardware is reasonably priced and development software is free. This guide is for students in ME 2011, or students anywhere who are confronting the Arduino for the first time. For advanced Arduino users, prowl the web; there are lots of resources.

Getting Started with C Programming for the ATMEL AVR Microcontrollers
This tutorial provides information on the tool and the basic steps for programming the Atmel AVR microcontrollers using C. It is aimed at people who are new to this family of microcontrollers. The Atmel STK500 development board and the ATmega16 chip are used in this tutorial; however, it is easy to adopt the information given here for other AVR chips.

Real-Time Operating Systems and Programming Languages for Embedded Systems
Section 1 describes the main characteristics that a real-time operating system should have.
Section 2 discusses the scope of some of the more well known RTOSs.
Section 3 introduces the languages used for real-time programming and compares the main characteristics.
Section 4 presents and compares different alternatives for the implementation of real-time Java.

Software Development for Parallel and Multi-Core Processing
The embedded software industry wants microprocessors with increased computing functionality that maintains or reduces space, weight, and power (SWaP). Single core processors were the key embedded industry solution between 1980 and 2000 when large performance increases were being achieved on a yearly basis and were fulfilling the prophecy of Moore's Law. Moore's Law states that "the number of transistors that can be placed inexpensively on an integrated circuit doubles approximately every two years." With the increased transistors, came microprocessors with greater computing throughput while space, weight and power were decreasing. However, this 'free lunch' did not last forever. The additional power required for greater performance improvements became too great starting in 2000. Hence, single core microprocessors are no longer an optimal solution.
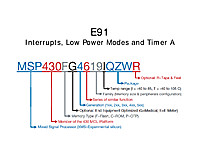
Interrupts, Low Power Modes and Timer A
This document contains a lot of what you need to know to get the most out of the MSP430. The MSP430 line is renowned for it's low power usage, and to really utilize it well you have to architect your software to be an interrupt driven device that utilizes the low power modes.

PID Without a PhD
PID (proportional, integral, derivative) control is not as complicated as it sounds. Follow these simple implementation steps for quick results.
Memory allocation in C
This article is about dynamic memory allocation in C in the context of embedded programming. It describes the process of dynamically allocating memory with visual aids. The article concludes with a practical data communications switch example which includes a sample code in C.

CPU Memory - What Every Programmer Should Know About Memory
As CPU cores become both faster and more numerous, the limiting factor for most programs is now, and will be for some time, memory access. Hardware designers have come up with ever more sophisticated memory handling and acceleration techniques–such as CPU caches–but these cannot work optimally without some help from the programmer. Unfortunately, neither the structure nor the cost of using the memory subsystem of a computer or the caches on CPUs is well understood by most programmers. This paper explains the structure of memory subsystems in use on modern commodity hardware, illustrating why CPU caches were developed, how they work, and what programs should do to achieve optimal performance by utilizing them.
Embedded Systems – Theory and Design Methodology
This book addresses a wide spectrum of research topics on embedded systems, including basic researches, theoretical studies, and practical work.
Memory allocation in C
This article is about dynamic memory allocation in C in the context of embedded programming. It describes the process of dynamically allocating memory with visual aids. The article concludes with a practical data communications switch example which includes a sample code in C.
Embedded Systems – Theory and Design Methodology
This book addresses a wide spectrum of research topics on embedded systems, including basic researches, theoretical studies, and practical work.
CPU Memory - What Every Programmer Should Know About Memory
As CPU cores become both faster and more numerous, the limiting factor for most programs is now, and will be for some time, memory access. Hardware designers have come up with ever more sophisticated memory handling and acceleration techniques–such as CPU caches–but these cannot work optimally without some help from the programmer. Unfortunately, neither the structure nor the cost of using the memory subsystem of a computer or the caches on CPUs is well understood by most programmers. This paper explains the structure of memory subsystems in use on modern commodity hardware, illustrating why CPU caches were developed, how they work, and what programs should do to achieve optimal performance by utilizing them.
Open Source in Embedded System Development
This paper introduces the huge range of free and open source software available to the embedded software developer. Hardware modeling, software tool chains, operating systems (RTOS and Linux), middleware and applications are all covered. Today open source is spreading to the hardware world. The paper addresses the advantages and risks associated with using free and open source software, including the issues of quality, support and licensing.
Real-Time Operating Systems and Programming Languages for Embedded Systems
Section 1 describes the main characteristics that a real-time operating system should have.
Section 2 discusses the scope of some of the more well known RTOSs.
Section 3 introduces the languages used for real-time programming and compares the main characteristics.
Section 4 presents and compares different alternatives for the implementation of real-time Java.

Interrupt handling in an ARM processor
This document is going to guide you at every step as you sit down to design the interrupt handling in software for an ARM system.
Getting Started with C Programming for the ATMEL AVR Microcontrollers
This tutorial provides information on the tool and the basic steps for programming the Atmel AVR microcontrollers using C. It is aimed at people who are new to this family of microcontrollers. The Atmel STK500 development board and the ATmega16 chip are used in this tutorial; however, it is easy to adopt the information given here for other AVR chips.
Design and Implementation of the lwIP Stack
LwIP is an implementation of the TCP/IP protocol stack. The focus of the lwIP stack is to reduce memory usage and code size, making lwIP suitable for use in small clients with very limited resources such as embedded systems. In order to reduce processing and memory demands, lwIP uses a tailor made API that does not require any data copying. This report describes the design and implementation of lwIP. The algorithms and data struc- tures used both in the protocol implementations and in the sub systems such as the memory and bu®er management systems are described. Also included in this report is a reference manual for the lwIP API and some code examples of using lwIP.

Consistent Overhead Byte Stuffing
Byte stuffing is a process that transforms a sequence of data bytes that may contain ‘illegal’ or ‘reserved’ values into a potentially longer sequence that contains no occurrences of those values. The extra length is referred to in this paper as the overhead of the algorithm. To date, byte stuffing algorithms, such as those used by SLIP [RFC1055], PPP [RFC1662] and AX.25 [ARRL84], have been designed to incur low average overhead but have made little effort to minimize worst case overhead. Some increasingly popular network devices, however, care more about the worst case. For example, the transmission time for ISM-band packet radio transmitters is strictly limited by FCC regulation. To adhere to this regulation, the practice is to set the maximum packet size artificially low so that no packet, even after worst case overhead, can exceed the transmission time limit. This paper presents a new byte stuffing algorithm, called Consistent Overhead Byte Stuffing (COBS), that tightly bounds the worst case overhead. It guarantees in the worst case to add no more than one byte in 254 to any packet. Furthermore, the algorithm is computationally cheap, and its average overhead is very competitive with that of existing algorithms.
PID Without a PhD
PID (proportional, integral, derivative) control is not as complicated as it sounds. Follow these simple implementation steps for quick results.









