




- What I am trying to do : Run 3-phase Induction motor using Direct Torque Control method.

- What I am sensing: 3-phase stator currents through current sensor board and speed through speed encoder.

- MCU: TI C2000 F29069M
- Level Shifter: 2.5 shift, 0.5 gain
- Current sensor: 0.1 gain
- The issue: Significant jumps in current retrieved and seen through DAC, even if the voltage supply is not given.
- Waveforms shown below:
- Yellow : Phase A current retrieved and seen through DAC
- Green : Phase B current in DAC
- Blue : Phase C current in DAC
- Pink : Phase A actual current sensed by current probe
- Fig 1. Only shift seen in DAC as the code is not yet turned on.
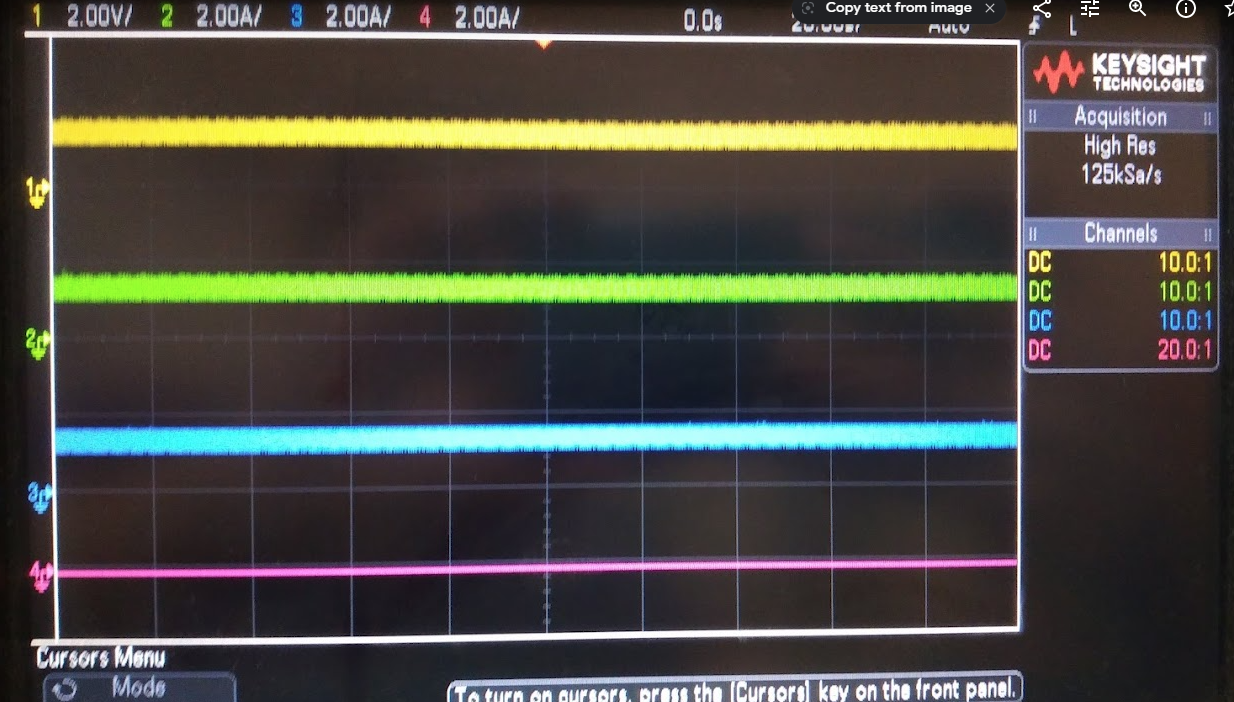
- Fig 1. Only the shift of level shifter seen in DAc as code not yet started. Fig 2 Below shown when the inverter switching is started, these jumps are seen in the phase currents 1. 2. & 3 waveforms .
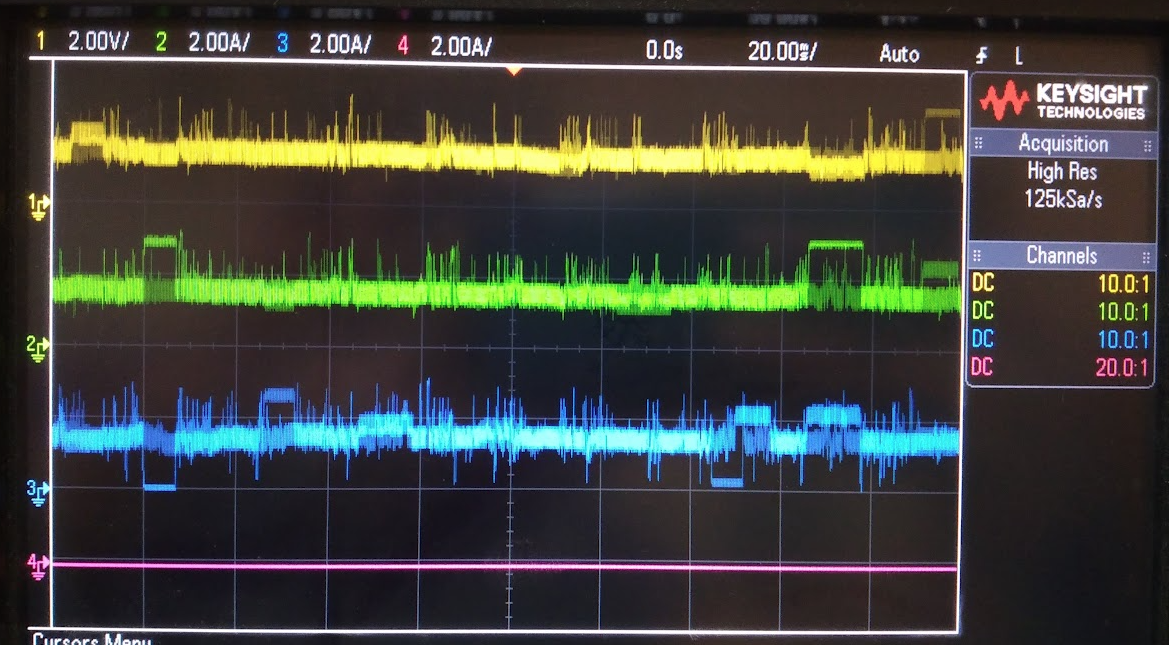
Fig .2 Jumps in current even though supply is off
- Fig 3. When supply is given, the first three waves (phase A, B, C currents) are not sine wave as they should come as the 4th waveform (pink). 4th waveform is the phase A current through current probe.

- Another issue I am facing is that the speed encoder is not giving some constant value of speed while running the motor. It is varying a lot by +-30 to 40 rpm which is affecting the speed control PI loop as well. Is it because of the encoder fault or in my code some problem is there?
- DTC_code_in_the_making_running.rar
- https://drive.google.com/file/d/1hhtWEjeKVyfbSTSMe...
- https://drive.google.com/file/d/1Y5nbDf3eZ-TORg3oS...












